PROJECTS
A collection of my work in robotics, autonomous systems, and software development. Each project represents a unique challenge in bringing intelligent machines to life, from reinforcement learning for bipedal locomotion to full-stack robotics platforms.

RoboCloud Hub
A unified platform for the robotics ecosystem. Features comprehensive learning paths, community chat channels, job board, and a marketplace for parts. Built with React, Node.js, and Prisma.
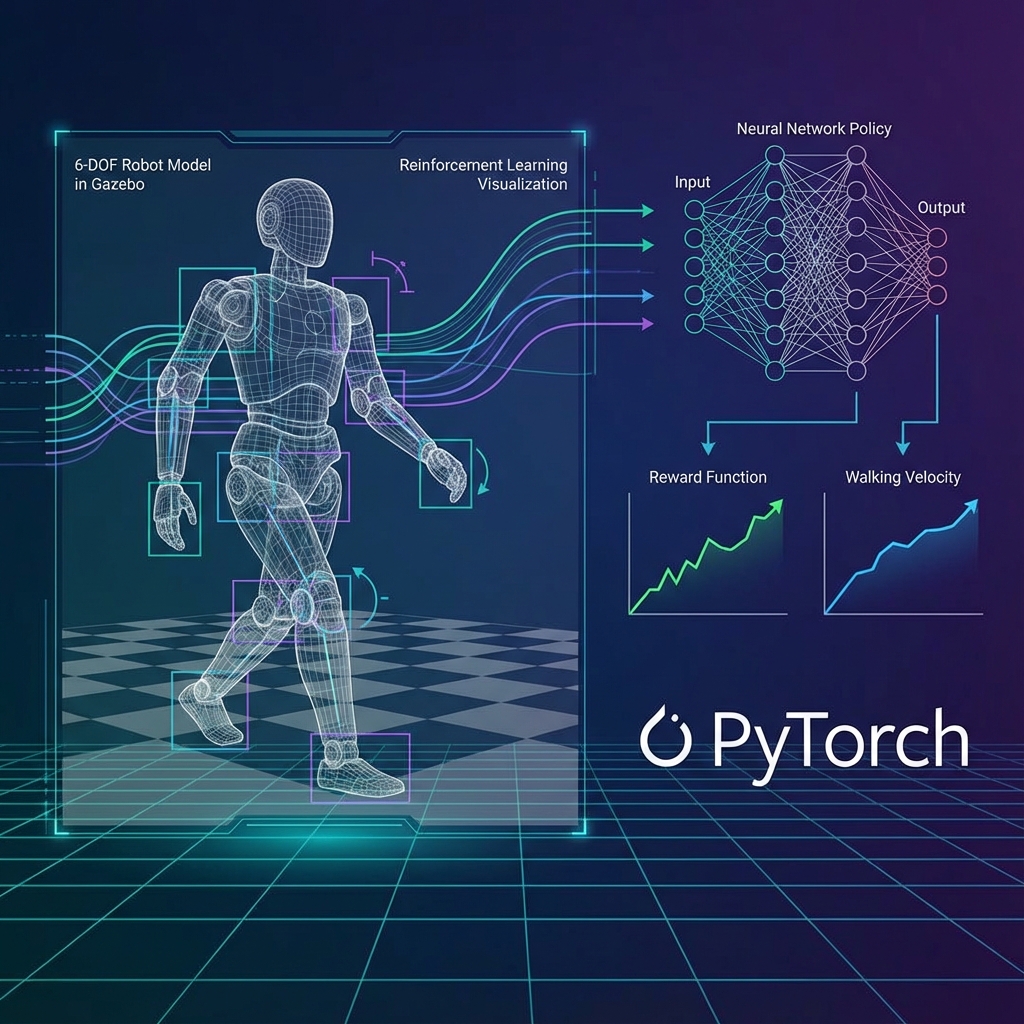
Complete reinforcement learning framework for training a bipedal robot to walk using ROS 2, Gazebo, and PyTorch PPO. Features custom 6-DOF robot simulation and advanced reward engineering.

Autonomous mobile manipulator combining differential drive base with robotic arm, trained using RL for pick-and-place operations. Integrates RGB-D perception and continuous action space control.
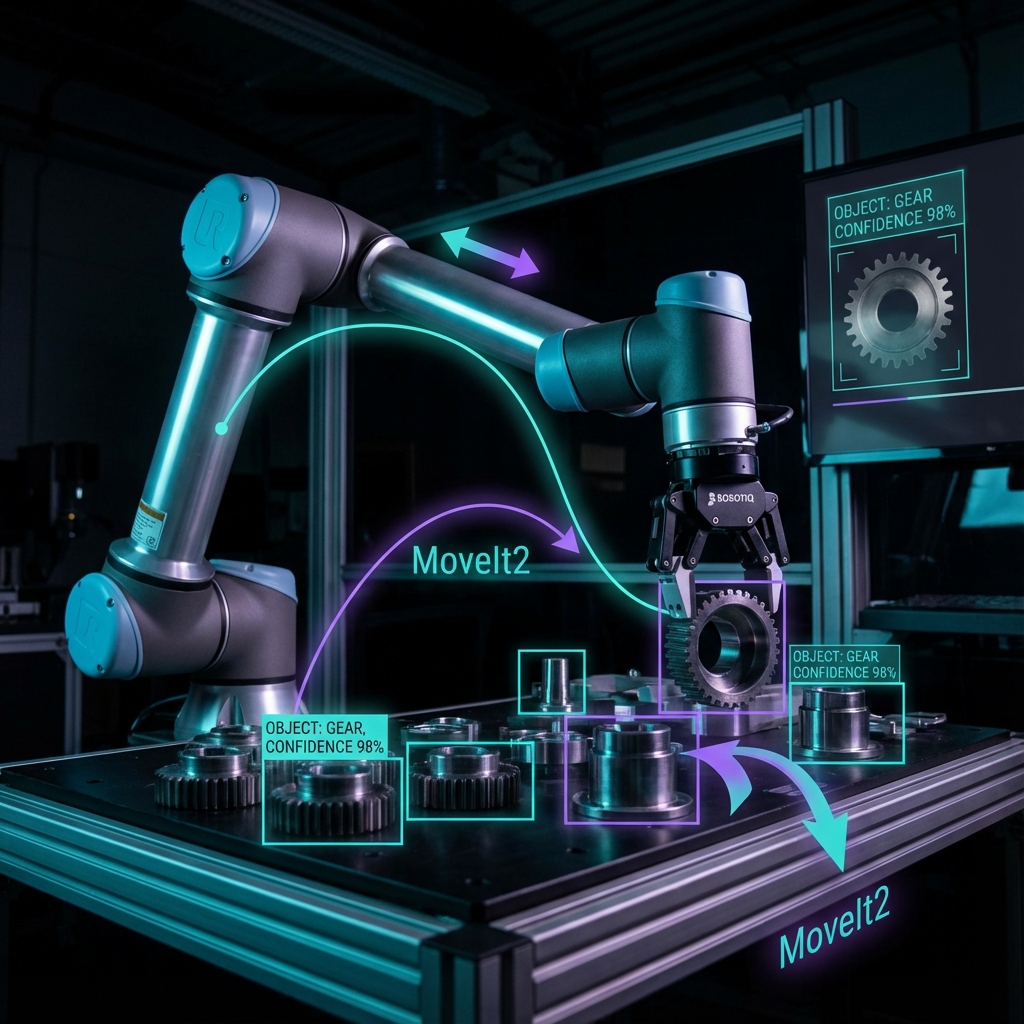
Advanced robotic manipulation system using UR5 robotic arm with Robotiq gripper. Features computer vision-based object detection, inverse kinematics, and collision-aware motion planning.
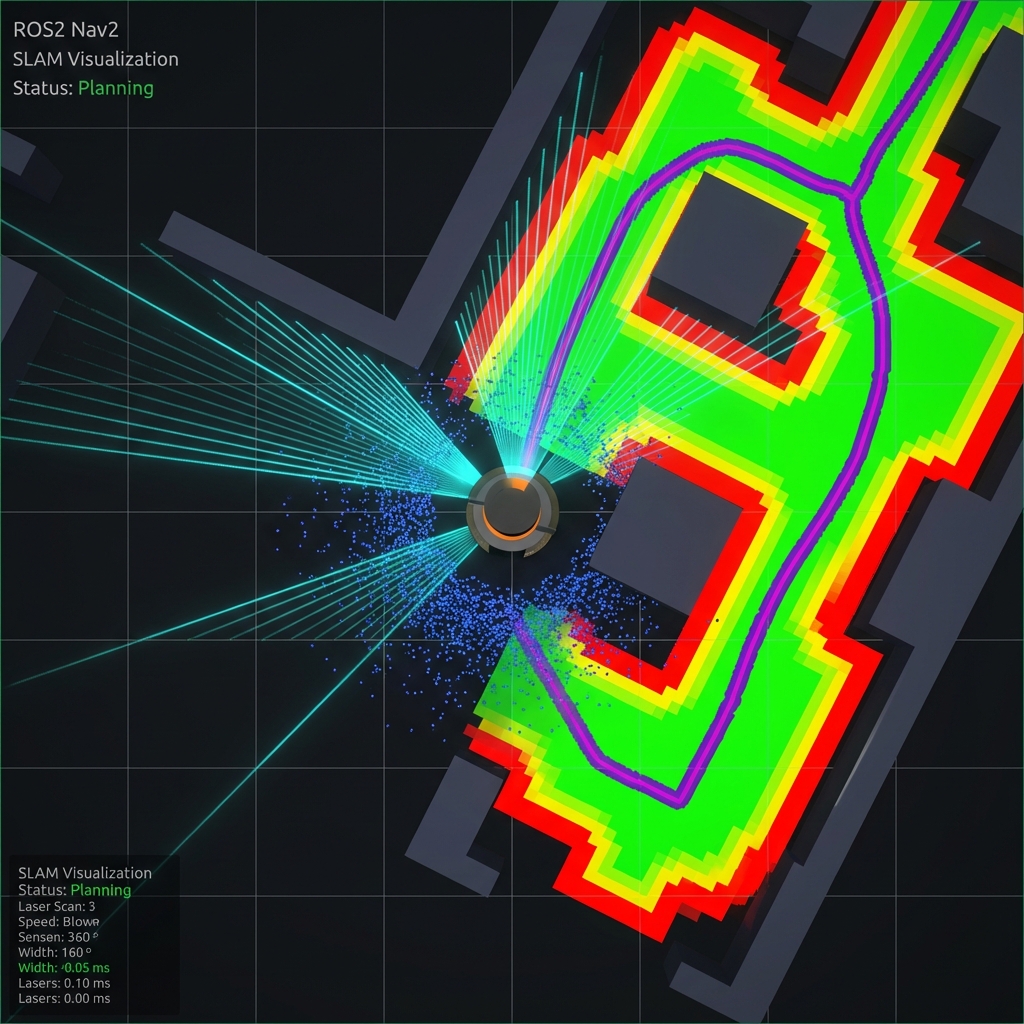
Complete autonomous navigation pipeline featuring SLAM mapping, dynamic obstacle avoidance, and path planning. Built with Nav2 stack, SLAM Toolbox, and advanced algorithms for real-time LiDAR processing and localization in complex environments.
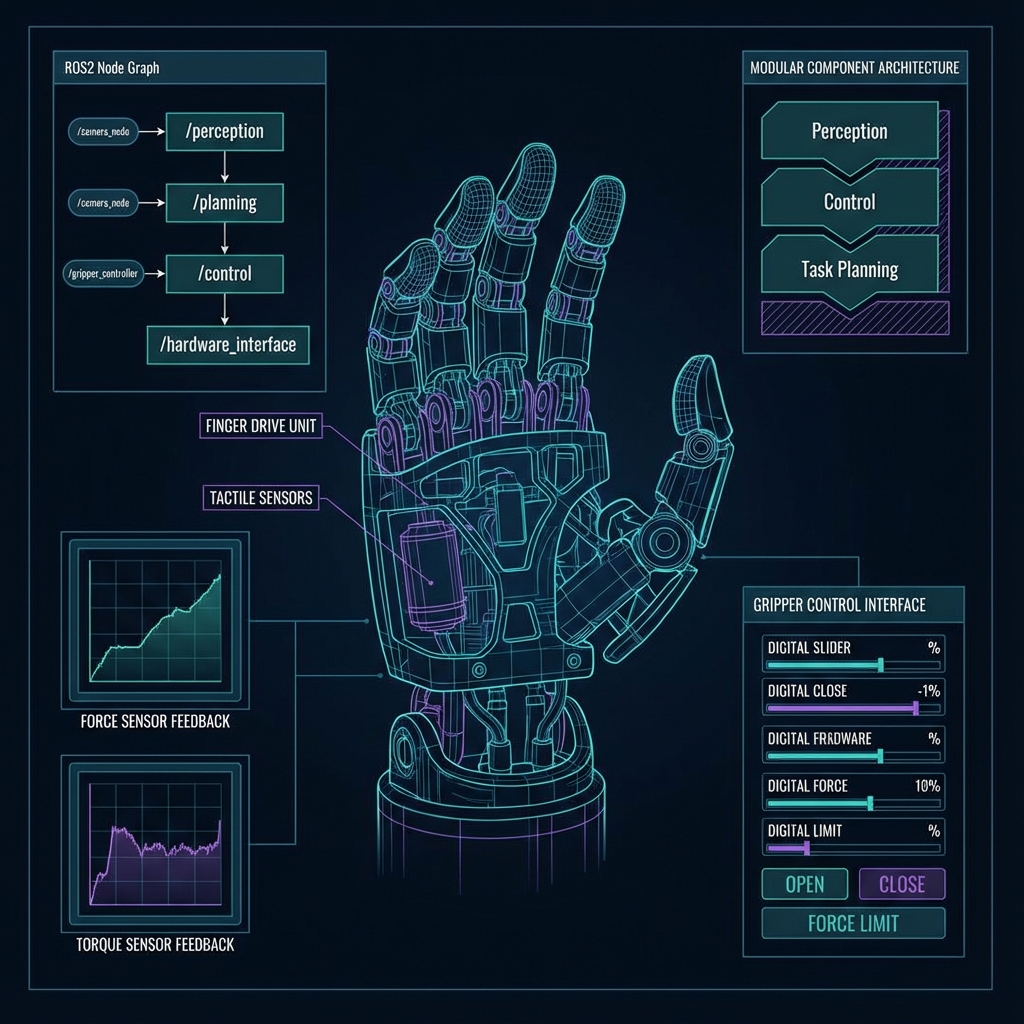
Comprehensive ROS2-based manipulation framework with advanced gripper control, perception pipeline integration, and task orchestration capabilities. Designed for complex multi-step robotics operations with modular architecture for easy extensibility.